IplImage像素访问
来源:互联网 发布:免费体育直播软件 编辑:程序博客网 时间:2024/06/10 04:30
一、IplImage文件结构
首先察看来自Opencv中文网的关于OpenCV结构的介绍。typedef struct _IplImage{ int nSize; /* IplImage大小,=sizeof(IplImage)*/ int ID; /* 版本 (=0)*/ int nChannels; /* 大多数OPENCV函数支持1,2,3 或 4 个通道 */ int alphaChannel; /* 被OpenCV忽略 */ int depth; /* 像素的位深度: IPL_DEPTH_8U, IPL_DEPTH_8S, IPL_DEPTH_16U, IPL_DEPTH_16S, IPL_DEPTH_32S, IPL_DEPTH_32F and IPL_DEPTH_64F 可支持 */ char colorModel[4]; /* 被OpenCV忽略 */ char channelSeq[4]; /* 被OpenCV忽略 */ int dataOrder; /* 0 - 交叉存取颜色通道,对三通道RGB图像,像素存储顺序为BGR BGR BGR ... BGR; 1 - 分开的颜色通道,对三通道RGB图像,像素存储顺序为RRR...R GGG...G BBB...B。 cvCreateImage只能创建交叉存取图像 */ int origin; /* 0 - 顶—左结构, 1 - 底—左结构 (Windows bitmaps 风格) */ int align; /* 图像行排列 (4 or 8). OpenCV 忽略它,使用 widthStep 代替 */ int width; /* 图像宽像素数 */ int height; /* 图像高像素数*/ struct _IplROI *roi;/* 图像感兴趣区域. 当该值非空只对该区域进行处理 */ struct _IplImage *maskROI; /* 在 OpenCV中必须置NULL */ void *imageId; /* 同上*/ struct _IplTileInfo *tileInfo; /*同上*/ int imageSize; /* 图像数据大小(在交叉存取格式下imageSize=image->height*image->widthStep),单位字节*/ char *imageData; /* 指向排列的图像数据 */ int widthStep; /* 排列的图像行大小,以字节为单位 */ int BorderMode[4]; /* 边际结束模式, 被OpenCV忽略 */ int BorderConst[4]; /* 同上 */ char *imageDataOrigin; /* 指针指向一个不同的图像数据结构(不是必须排列的),是为了纠正图像内存分配准备的 */}IplImage;
IplImage结构来自于IntelImage Processing Library(是其本身所具有的)。OpenCV只支持其中的一个子集:
alphaChannel表示透明度信息,在OpenCV中被忽略。
colorModel和channelSeq被OpenCV忽略。OpenCV颜色转换的唯一函数cvCvtColor将原图像的颜色空间和目标图像的颜色空间都作为一个参数。
dataOrder必须是IPL_DATA_ORDER_PIXEL(颜色通道是交叉存取),然而平面图像的被选择通道可以被处理,就像COI(感兴趣的通道)被设置过一样。
align是被OpenCV忽略的,而用widthStep去访问后继的图像行。
不支持maskROI。处理MASK的函数把他当作一个分离的参数。MASK在OpenCV里是8-bit,然而在IPL他是1-bit。
tileInfo不支持。
BorderMode和BorderConst是不支持的。每个OpenCV函数处理像素的邻近的像素,通常使用单一的固定代码边际模式。
除了上述限制,OpenCV处理ROI有不同的要求。要求原图像和目标图像的尺寸或ROI的尺寸必须(根据不同的操作,例如cvPyrDown目标图像的宽(高)必须等于原图像的宽(高)除以2±1)精确匹配,而IPL处理交叉区域,如图像的大小或ROI大小可能是完全独立的。
对于图像像素的访问有直接方式以及间接方式之分,直接方式就是拿到像素数据,根据要访问的坐标计算出访问的位置,效率高,但容易出错,间接方式则可以通过一些函数实现,操作简单但是效率低。二、直接访问
需要用到的的两个元素是:char *imageData以及widthStep。imageData是存放图像像素数据指针,而widStep表示存储每一行图像数据字节个数,4个字节对齐。
例如我们定义了一个IplImage结构,需要进行像素访问。
IplImage*src=cvCreateImage(cvSize(400,300), IPL_DEPTH_8U,3);
上句定义了一个IplImage指针变量src,图像的大小是400×300,图像颜色深度8位,3通道图像。
IplImage图像中各个像素点的颜色值存储在imageData指向的一片连续的内存中,可看成一个一维数组。图像数据采用interleaved的方式存储,如果图像的色彩空间是RGB空间的话,则该片内存中的数据按照BGR的顺序排列。
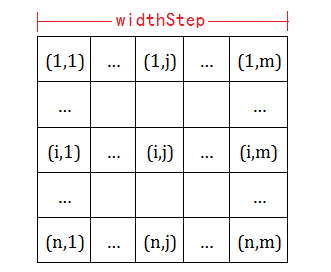
一张n行m列,depth为IPL_DEPTH_8U,nChannels为1的图像
而一张n行m列,depth为IPL_DEPTH_8U,nChannels为3的RGB彩色图像,其在内存中的存储方式如下:
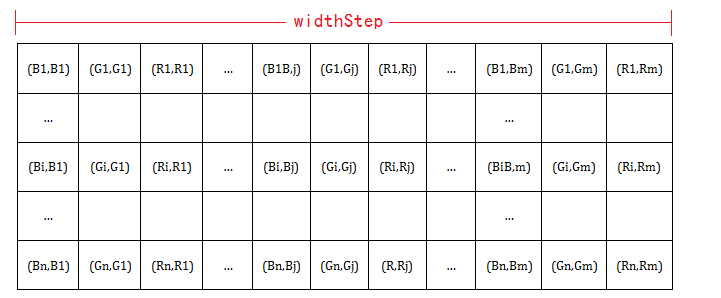
像素(0,0)B,像素(0,0)G,像素(0,0)R,像素(0,1)B,像素(0,1)G,像素(0,1)R...像素(0,n-1)B,像素(0,n-1)G,像素(0,n-1)R,{填充字节},
...
像素(m-1,0)B,像素(m-1,0)G,像素(m-1,0)R,像素(m-1,1)B,像素(m-1,1)G,像素(m-1,1)R...像素(m-1,n-1)B,像素(m-1,n-1)G,像素(m-1,n-1)R,{填充字节}
可以注意到每一行除了像素的颜色值之外,还有一些填充字节。这是因为在IplImage的定义中,widthStep必须是4的倍数;也就是说widthStep并不是等于width*nChannels,而是等于最接近width*nChannels的4的倍数,为了方便32bit的位对齐所做的约定。
2.1.直接访问方式1:
对于单通道字节型图像:
IplImage*img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);((uchar*)(img->imageData+i*img->widthStep))[j]=111;
对于多通道字节型图像:
IplImage*img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);((uchar*)(img->imageData+i*img->widthStep))[j*img->nChannels+ 0]=111;// B((uchar*)(img->imageData+i*img->widthStep))[j*img->nChannels+ 1]=112;// G((uchar*)(img->imageData+i*img->widthStep))[j*img->nChannels+ 2]=113;// R
对于多通道浮点型图像:
要注意imageData是uchar*类型,而widthStep则是每一行字节个数。IplImage*img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);((float*)(img->imageData+i*img->widthStep))[j*img->nChannels+ 0]=111;// B((float*)(img->imageData+i*img->widthStep))[j*img->nChannels+ 1]=112;// G((float*)(img->imageData+i*img->widthStep))[j*img->nChannels+ 2]=113;// R
2.2.直接访问方式2:
对于单通道字节型图像:
IplImage*img =cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);intheight =img->height;intwidth =img->width;intstep =img->widthStep/sizeof(uchar);uchar*data =(uchar*)img->imageData;data[i*step+j]= 111;
对于多通道字节型图像:
IplImage*img =cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,3);intheight =img->height;intwidth =img->width;intstep =img->widthStep/sizeof(uchar);intchannels =img->nChannels;uchar*data =(uchar*)img->imageData;data[i*step+j*channels+k]= 111;
对于多通道浮点型图像(假设图像数据采用4字节(32位)行对齐方式):
IplImage*img =cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);intheight =img->height;intwidth =img->width;intstep =img->widthStep/sizeof(float);intchannels =img->nChannels;float* data =(float*)img->imageData;data[i*step+j*channels+k]= 111;
三、间接访问
通用,但效率低,可访问任意格式的图像
对于单通道字节型图像:
IplImage*img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1);CvScalars;s=cvGet2D(img,i,j);// get the (i,j) pixel valueprintf("intensity=%f\n",s.val[0]);s.val[0]=111;cvSet2D(img,i,j,s);// set the (i,j) pixel value对于多通道字节型/浮点型图像:
IplImage*img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3);CvScalars;s=cvGet2D(img,i,j);// get the (i,j) pixel valueprintf("B=%f,G=%f, R=%f\n",s.val[0],s.val[1],s.val[2]);s.val[0]=111;s.val[1]=111;s.val[2]=111;cvSet2D(img,i,j,s);// set the (i,j) pixel value使用cvGet2D()函数访问:
cvGet*D系列函数可以用来返回特定位置的数组元素(一般使用cvGet2D),原型如下:
CvScalar cvGet1D( const CvArr* arr, int idx0 ); CvScalar cvGet2D( const CvArr* arr, int idx0, int idx1 ); CvScalar cvGet3D( const CvArr* arr, int idx0, int idx1, int idx2 );CvScalar cvGetND( const CvArr* arr, int* idx );
idx0,idx1,idx2分别用来指示元素数组下标,即cvGet2D返回(idx0,idx1)处元素的值。
因此,单通道图像像素访问方式如下:
多通道字节型/浮点型图像:
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_8U,1); double tmp; for(int i=0;i<img->height;i++) for(int j=0;j<img->width;j++) tmp=cvGet2D(img,i,j).val[0];
IplImage* img=cvCreateImage(cvSize(640,480),IPL_DEPTH_32F,3); double tmpb,tmpg,bmpr; for(int i=0;i<img->height;i++) for(int j=0;j<img->width;j++){ tmpb=cvGet2D(img,i,j).val[0]; tmpg=cvGet2D(img,i,j).val[1]; tmpr=cvGet2D(img,i,j).val[2]; }void cvSet1D( CvArr* arr, int idx0, CvScalar value ); void cvSet2D( CvArr* arr, int idx0, int idx1, CvScalar value ); void cvSet3D( CvArr* arr, int idx0, int idx1, int idx2, CvScalar value ); void cvSetND( CvArr* arr, int* idx, CvScalar value );
如果是修改元素的值,可用cvSet*D(一般是cvSet2D)函数:这种方法对于任何图像的访问方式是一样的,比较简单,但效率较低,不推荐使用。
参考:http://blog.csdn.net/xiaowei_cqu/article/details/7557063
http://wenku.baidu.com/view/62c6320e79563c1ec5da7187.html
http://www.opencv.org.cn/index.php/Cxcore%E5%9F%BA%E7%A1%80%E7%BB%93%E6%9E%84#IplImage- IplImage像素访问
- iplimage 像素访问
- IPLImage图像访问图片像素
- opencv中针对IplImage图像数据结构 怎么访问图像像素?
- IplImage访问图像中每个像素的值
- 【OpenCV】访问图像像素值并修改--IplImage
- Alpha通道?Mat和IplImage访问像素、uchar、Scalar?
- IplImage和Mat访问图像中每个像素
- Mat和IplImage访问像素的方法总结
- 访问Mat图像中的每个像素的值和IplImage格式图像中每个像素的值
- 访问IplImage像素的值,为负数,需转换为uchar。
- opencv中如何访问IplImage图像中每个像素的值
- IplImage\Mat\CvMat像素处理
- Opencv--Iplimage中像素操作
- 访问像素
- 像素访问
- opencv中IplImage读取图片像素问题
- Opencv得到图像(IplImage)中的像素
- csdn每次内测都搬出的测反应速度的网页小游戏
- 5求最大数---问555555的约数中最大的三位数是多少?
- C#DataGridView实现分页显示
- x264 frame级函数流程图(二)
- 2011级-csdn-java-张侃— 过滤器(自动登录)
- IplImage像素访问
- POJ 2709
- JavaScript异步编程
- hello_world-2.0之sys文件系统kobj
- Maven_Maven 安装
- mysql的truncate
- Android 怎么获取手机端的ip地址
- 哈夫曼编码
- Effective C++:条款8: 写operator new和operator delete时要遵循常规


